|
넷플릭스 드라마 '웬즈데이'에서 '씽'은 몸도 없이 손만 있는 기괴한 존재지만 어엿한 아담 가의 일원으로 장녀 웬즈데이를 돕는다./넷플릭스 |
넷플릭스 드라마 ‘웬즈데이’에는 봉합 자국이 가득한 손인 ‘씽(thing)’이 나온다. 몸도 없는 기괴한 존재지만, 어엿한 아담스 패밀리의 일원으로 대우받는다. 드라마의 상상력이 로봇으로 현실화됐다. 팔에서 떨어져 나와 단독으로 작업하는 로봇 손이다.
오드 빌라르(Aude Billard) 스위스 로잔 연방공대(ETH) 교수 연구진은 “기어 다니며 물체를 집을 수 있는 로봇 손을 개발했다”고 21일 국제 학술지 ‘네이처 커뮤니케이션’에 발표했다. 로봇 팔에 붙어 있다가 손만 떼어 물체를 집는 형태다. 덕분에 로봇의 활동 범위가 넓어진다고 연구진은 밝혔다.
◇손 분리해 여러 물체 동시 조작 가능
로봇 팔은 이미 산업 현장에서 자동차를 조립하고 용접을 하고 있다. 사람을 대신할 수 있도록 손 동작을 모방했다. 하지만 대부분 팔이 작업대에 고정된 형태여서 작업 범위가 제한된다. 좁은 곳에서도 작업하기 힘들고 여러 물체를 동시에 잡을 수도 없다. 빌라르 교수는 “집에서 세 아이를 키우다 보니 늘 팔과 손가락 사이에 여러 물건을 들고 다닐 수 밖에 없다”고 말했다. 로봇이 사람 손을 단순히 모방해서는 한계가 있다는 말이다.
연구진은 두 가지 버전의 로봇 손을 개발했다. 하나는 사람처럼 손가락이 다섯 개이고, 다른 것은 여섯 개다. 원반형 손바닥의 지름은 16㎝이다. 여기에 같은 모양의 손가락을 부착한다. 각각 대칭 구조를 갖춰 양쪽에서 잡을 수 있다. 특히 손은 로봇 팔에서 분리돼 드라마에 나오는 씽처럼 기어다닌다.
로봇 손은 컴퓨터 가상공간에서 소프트웨어로 물체 잡는 법을 학습했다. 그런 다음 현실 세계에서 작업을 수행했다. 실험에서 로봇 손은 골판지 원통과 고무공, 화이트보드 마커, 깡통 등 재질이 다른 다양한 물건을 안전하게 잡았다. 일상에서 활용될 수 있다는 말이다.
로봇 손은 최대 세 개까지 물건을 순차적으로 회수하고, 물건을 잡은 채 다시 로봇 팔에 부착될 수 있었다. 지금까지 로봇의 손동작은 손가락을 벌리고 오므리는 식으로 단순하거나 특정 작업에 맞는 동작만 했다. 이번에 개발한 로봇 손은 달랐다. 로봇 손은 사람 손이 물건을 잡는 33가지 동작을 구현했고, 최대 2㎏ 무게까지 잡을 수 있었다.
◇사람 손의 동작과 범위 한계 극복
연구진은 사람 손이 가진 한계를 직시했다. 빌라르 교수는 “사람이 뒤에 있는 물건을 잡으려면 손을 회전하고 매우 복잡한 동작을 한다”며 “또 다른 손가락과 맞대고 집을 수 있는 것도 엄지손가락 하나뿐”이라고 말했다.
이번에 개발한 로봇 손은 새로운 작동 원리로 사람 손의 한계를 극복했다. 로봇 손은 어느 손가락이나 모양이 같아 반대편 손가락과 만나 물건을 잡을 수 있다. 손바닥을 두고 양쪽 방향 어디로든 움직일 수 있다. 손가락들은 단독 또는 여러 개가 함께 물체를 감쌀 수 있으며, 물체를 플라스틱 손바닥에 얹고 옮길 수도 있다.
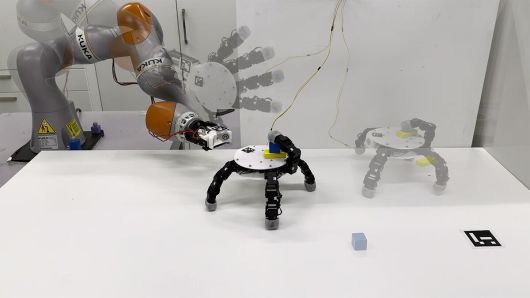 |
로봇 팔에서 분리돼 따로 움직이는 로봇 손. 손가락을 다리처럼 움직여 기어가고 물체를 잡을 수도 있다./스위스 로잔 연방공대 |
작업 범위도 기존 로봇의 한계를 넘어섰다. 논문 제1 저자인 가오 샤오(Xiao Gao) 박사는 “로봇 손은 팔에서 분리될 수 있어 일반 로봇이 접근할 수 없는 장소로 이동할 수 있다”고 설명했다. 로봇의 손가락은 물체를 집을 때는 집게가 됐다가 이동할 때는 거미의 다리처럼 움직였다. 연구진은 로봇 팔에서 손을 분리할 수 있어 수도관 내부나 잠수함 엔진실 같은 좁은 공간을 검사하고, 이물질을 잡아 제거할 수 있다고 전망했다.
영국 옥스퍼드대 로봇공학연구소의 페를라 마이올리노(Perla Maiolino) 부소장은 “이번 접근법은 생물학적 형태를 단순히 모방하지 않고 능력을 더 확장하는 방식이라는 점에서 혁신적”이라며 “팔에서 분리되는 로봇 손이나 손바닥 양쪽 방향으로 물체를 쥘 수 있는 로봇 손은 본 적이 없다”고 말했다.
물론 로봇 손은 아직 해결 과제가 많다. 당장 드라마에 나온 씽처럼 집에서 기어다닐 것 같지는 않다. 미국 카네기 멜론대의 낸시 폴라드(Nancy Pollard) 교수는 “이번 로봇손의 손가락은 반대 방향으로도 구부러질 수 있지만 사람 손가락만큼 물체 표면에 압력을 가할 수는 없어 보인다”고 지적했다.
침고 자료
Nature Communications(2026), DOI: https://doi.org/10.1038/s41467-025-67675-8
이영완 기자(ywlee@chosunbiz.com)
<저작권자 ⓒ ChosunBiz.com, 무단전재 및 재배포 금지>

![성매매 요구 거절에 격분…종로 여관에 불 질러 7명 목숨 앗아갔다[그해 오늘]](/_next/image?url=https%3A%2F%2Fthumb.zumst.com%2F256x144%2Fhttps%3A%2F%2Fstatic.news.zumst.com%2Fimages%2F24%2F2026%2F01%2F21%2Fa150eeb1bf52474a9ab984919d90c1ca.jpg&w=384&q=100)